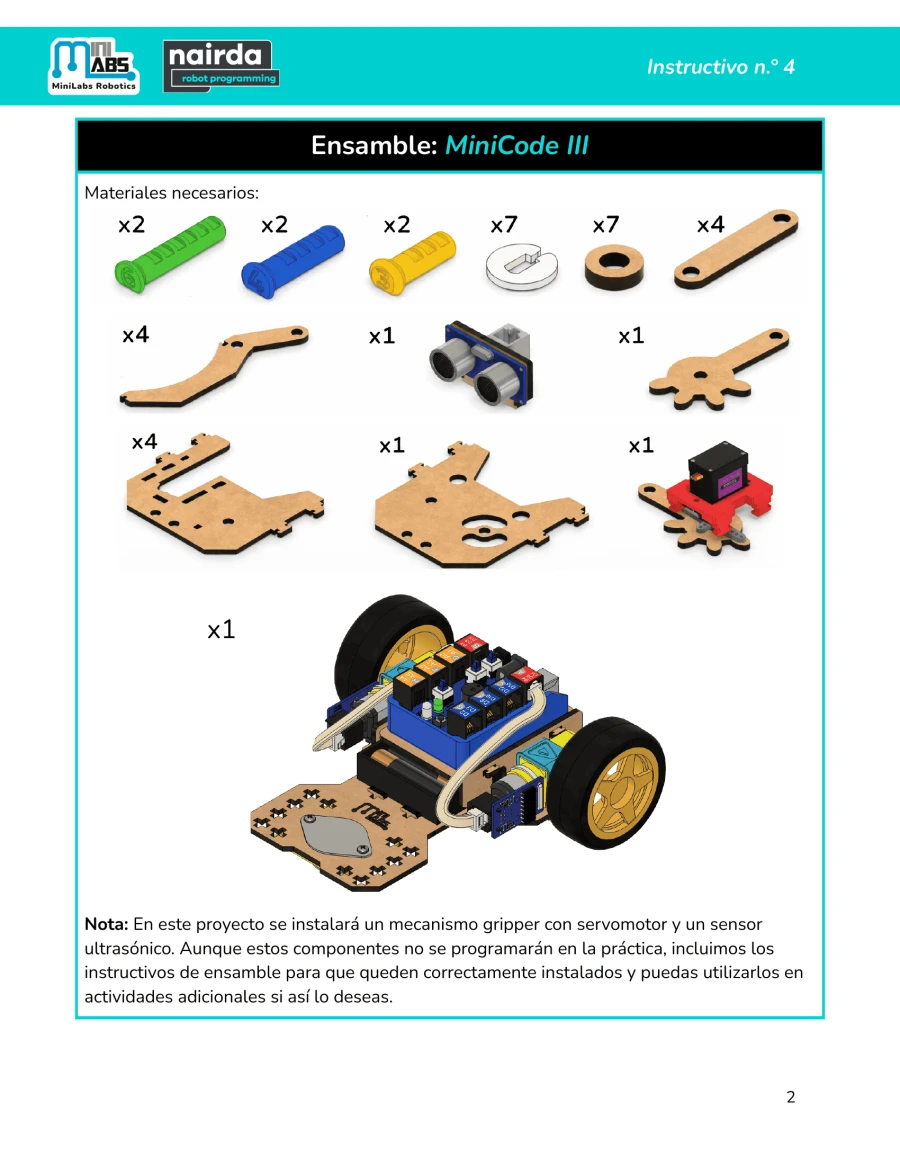
En este instructivo aprenderás a ensamblar el mecanismo gripper (pinza) con servomotor y sensor ultrasónico sobre tu MiniCode, y a programar un control remoto Bluetooth para manejar el robot desde la app de Nairda.
Ensamble MiniCode III
El ensamble del gripper se divide en 8 partes:
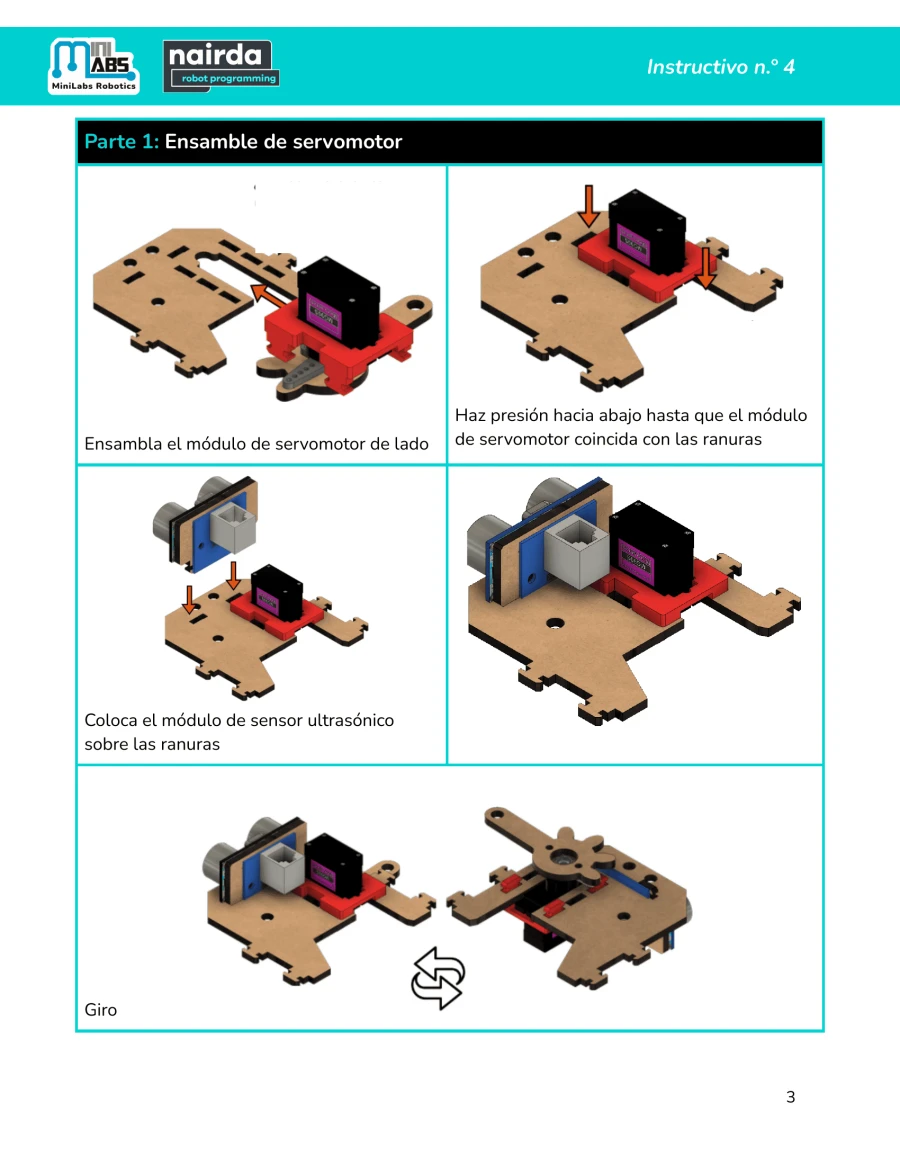
- Servomotor — Montaje del módulo de servomotor sobre el chasis.
- Sensor ultrasónico — Colocación sobre las ranuras del módulo.
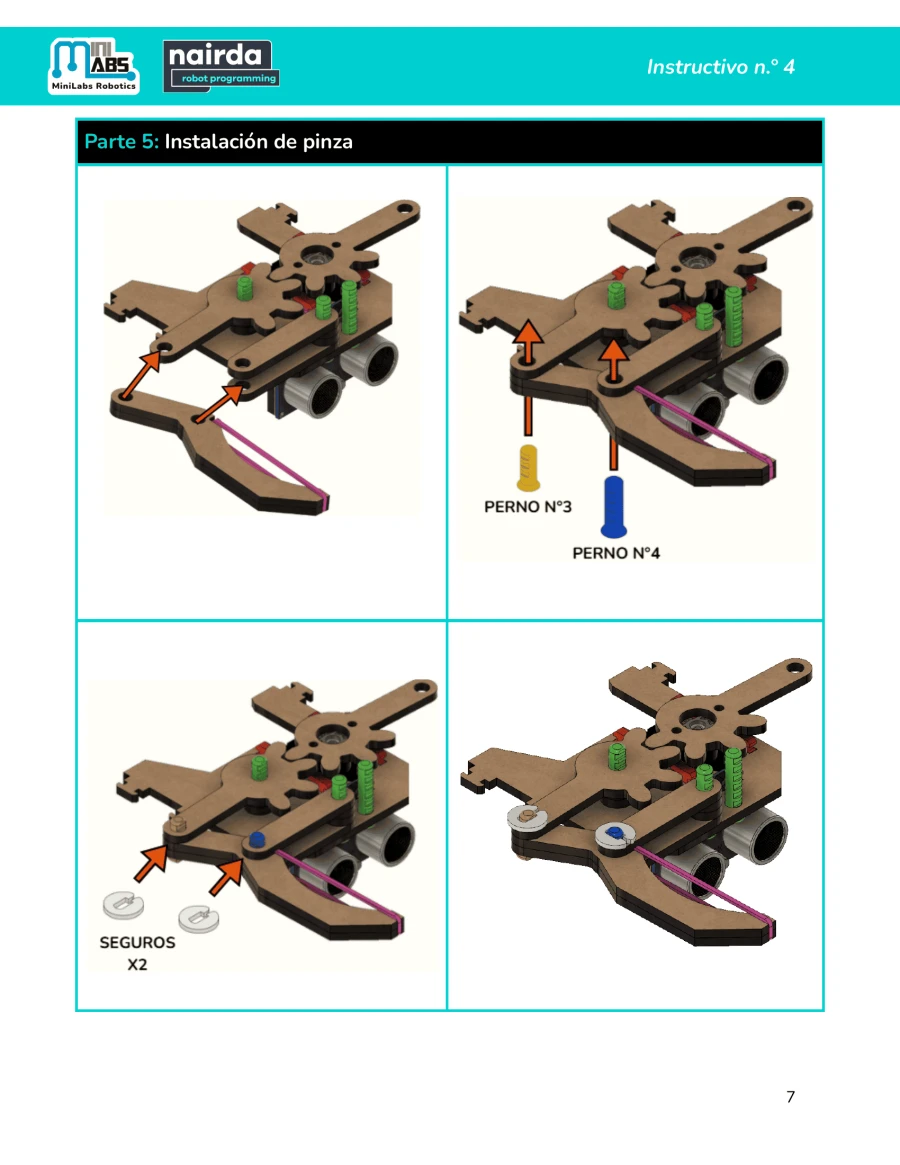
- Ajuste de pernos — Fijación del mecanismo.
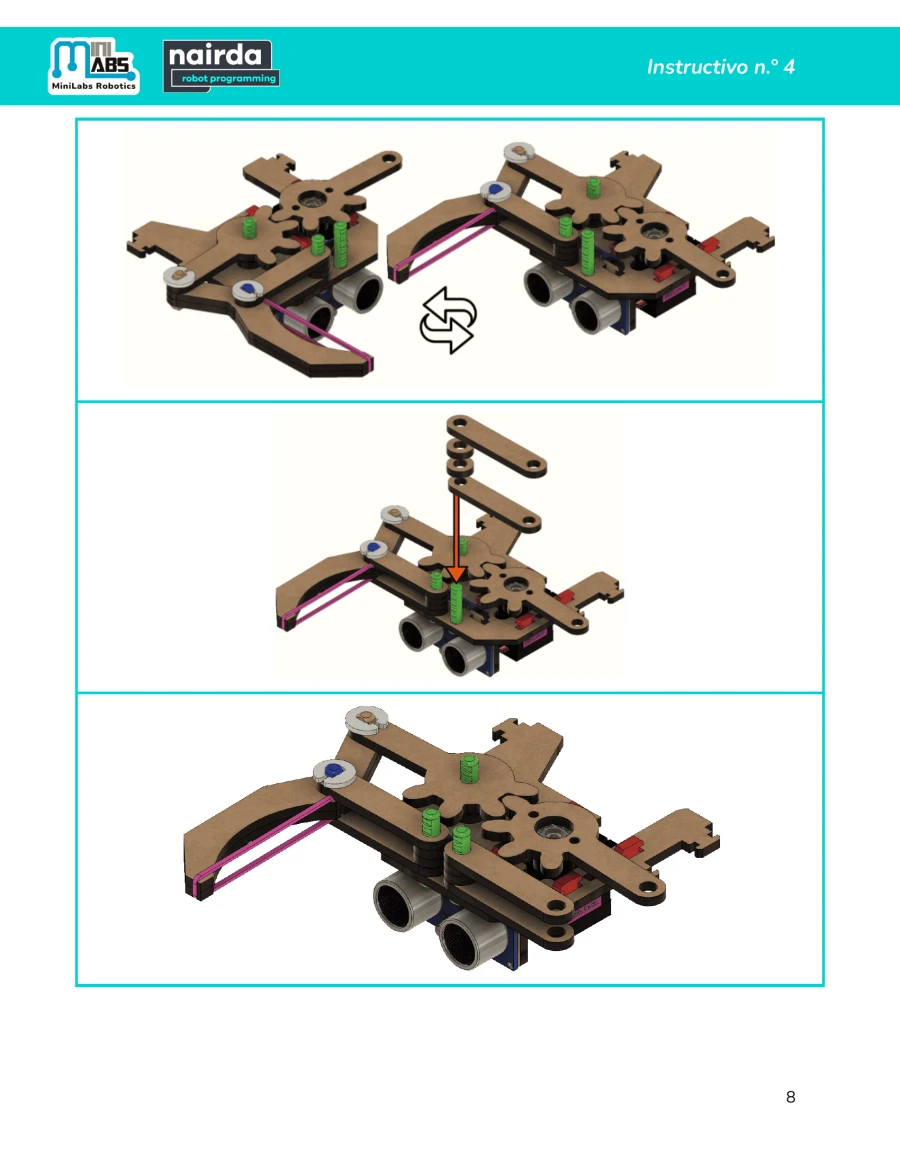
- Pinzas — Ensamble de las dos pinzas del gripper.
- Ajuste de pernos de pinzas — Fijación de las pinzas al mecanismo.
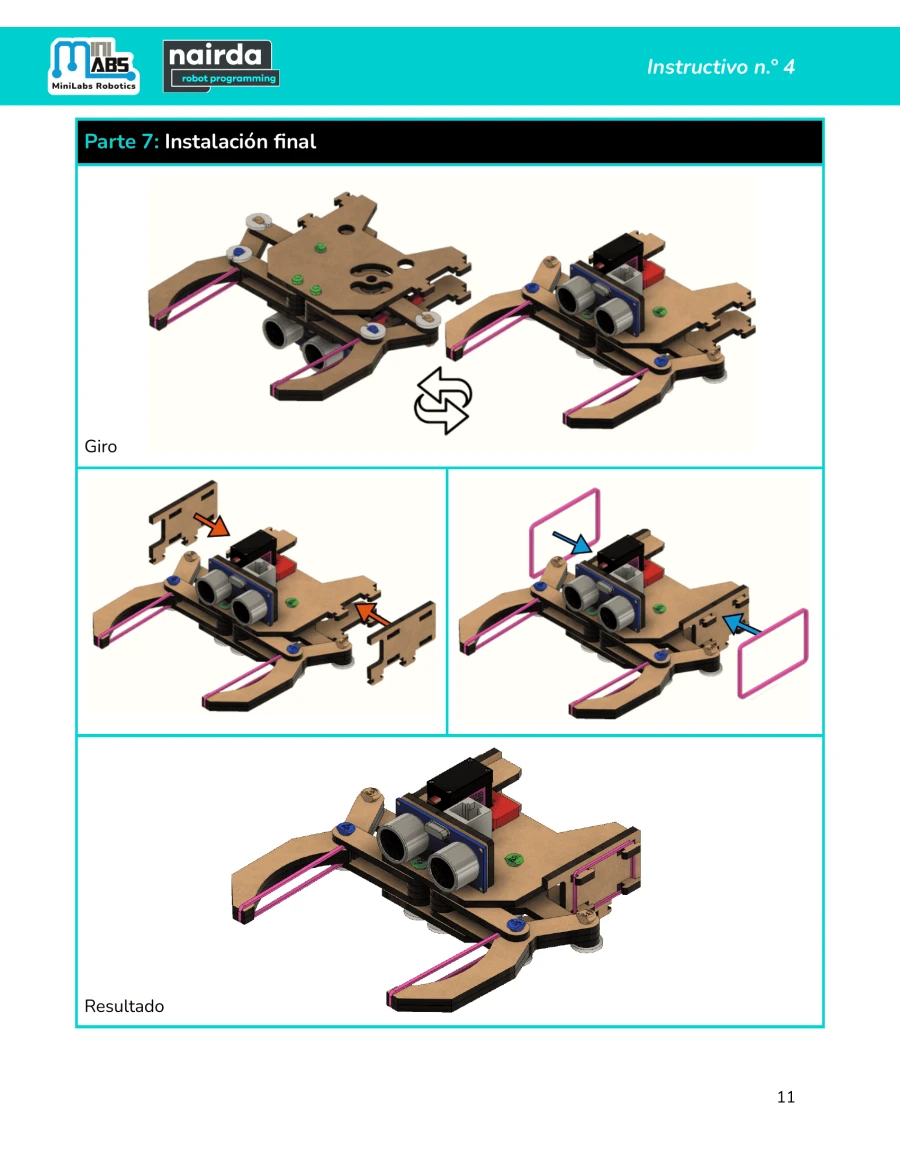
- Instalación de pinza — Montaje completo del gripper.
- Base — Agregar la base con 3 seguros.
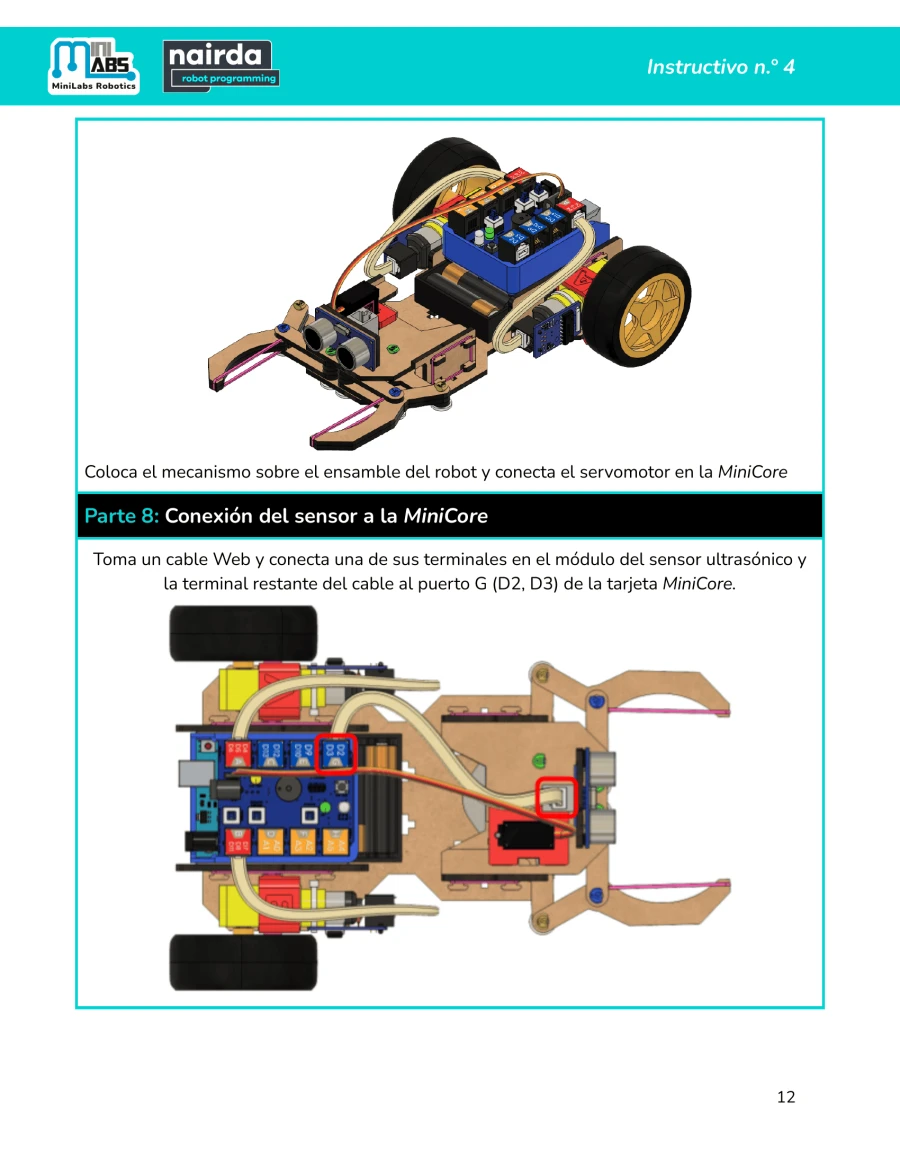
- Instalación final — Colocar el mecanismo sobre el robot y conectar servo y ultrasónico a la MiniCore.
ℹ️
Nota: Aunque el gripper y el sensor ultrasónico no se programan en esta práctica, quedan instalados para actividades adicionales.
Programación: Control Remoto
La programación incluye:
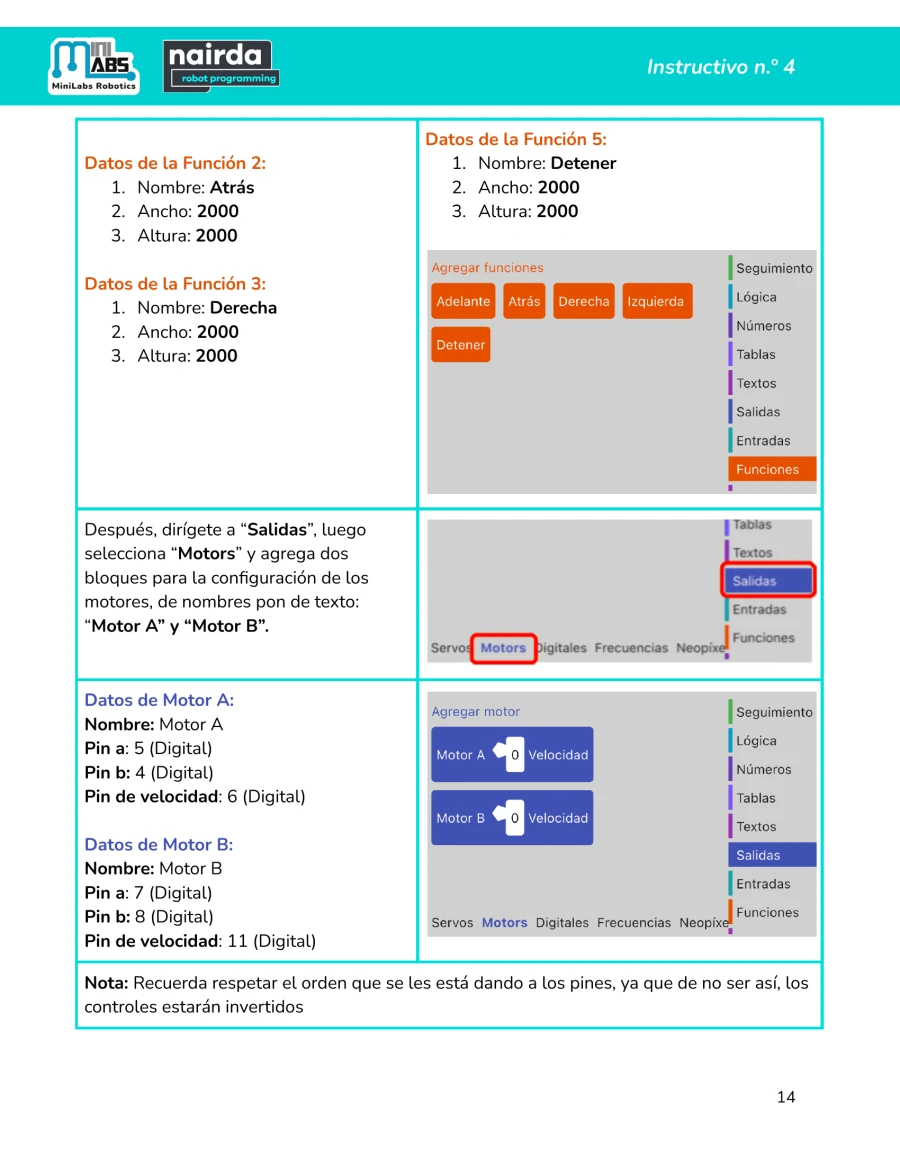
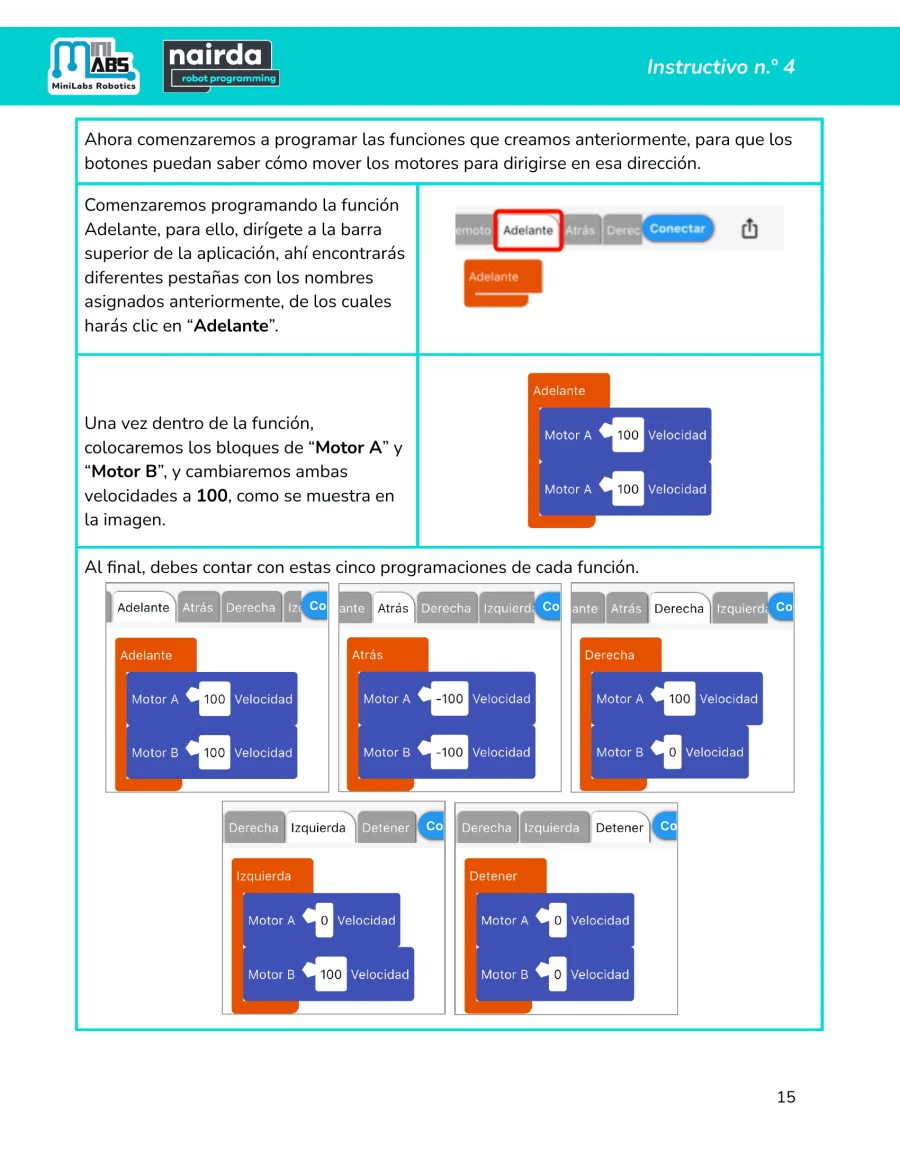
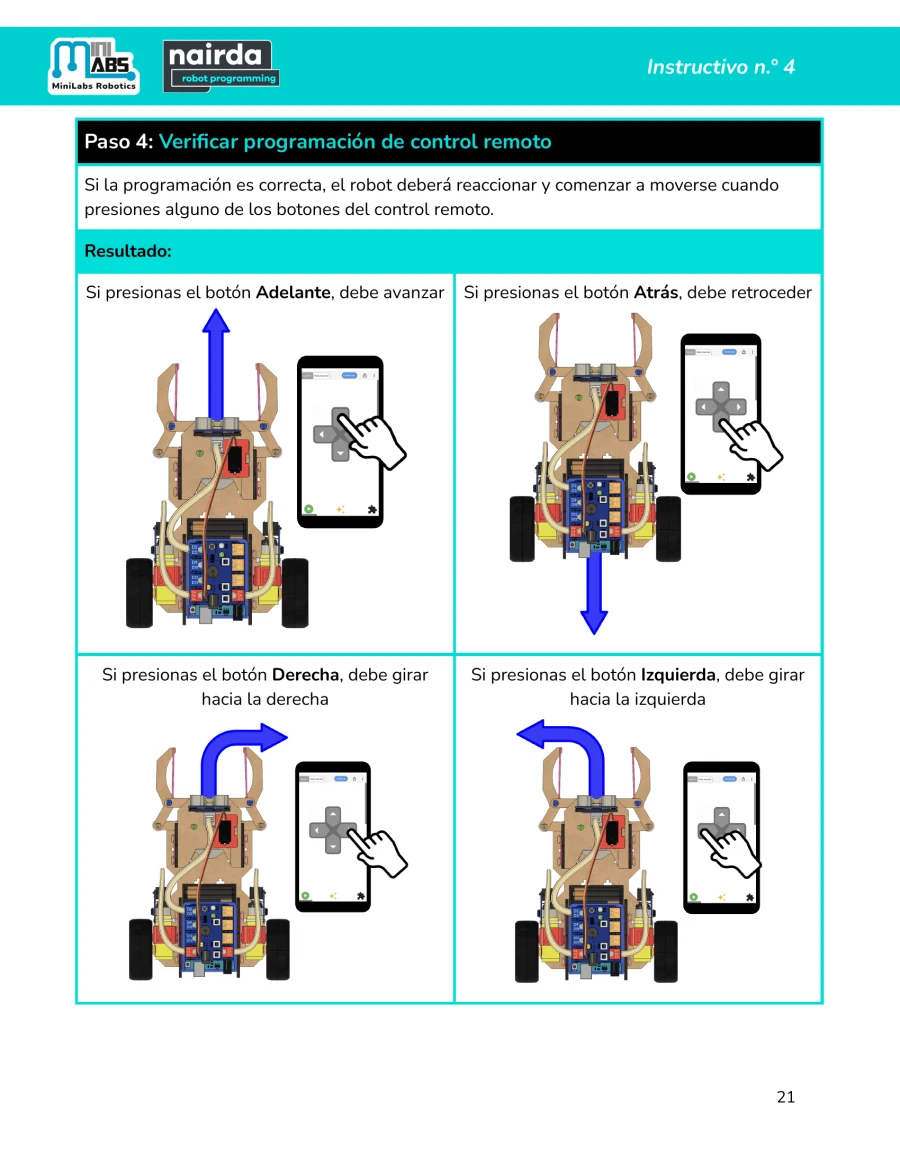
- 5 funciones: Adelante, Atrás, Derecha, Izquierda y Detener.
- Configuración de motores A y B con velocidades de 100 y -100.
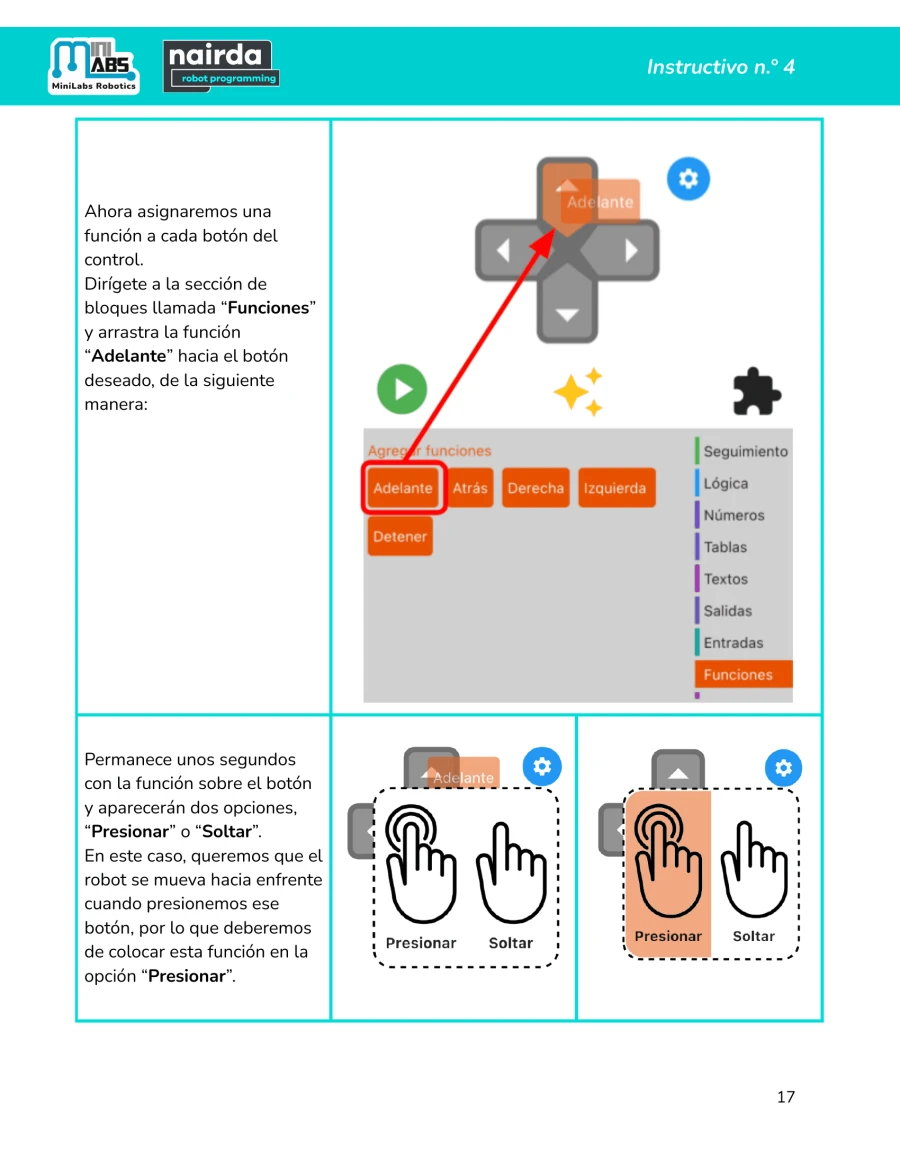
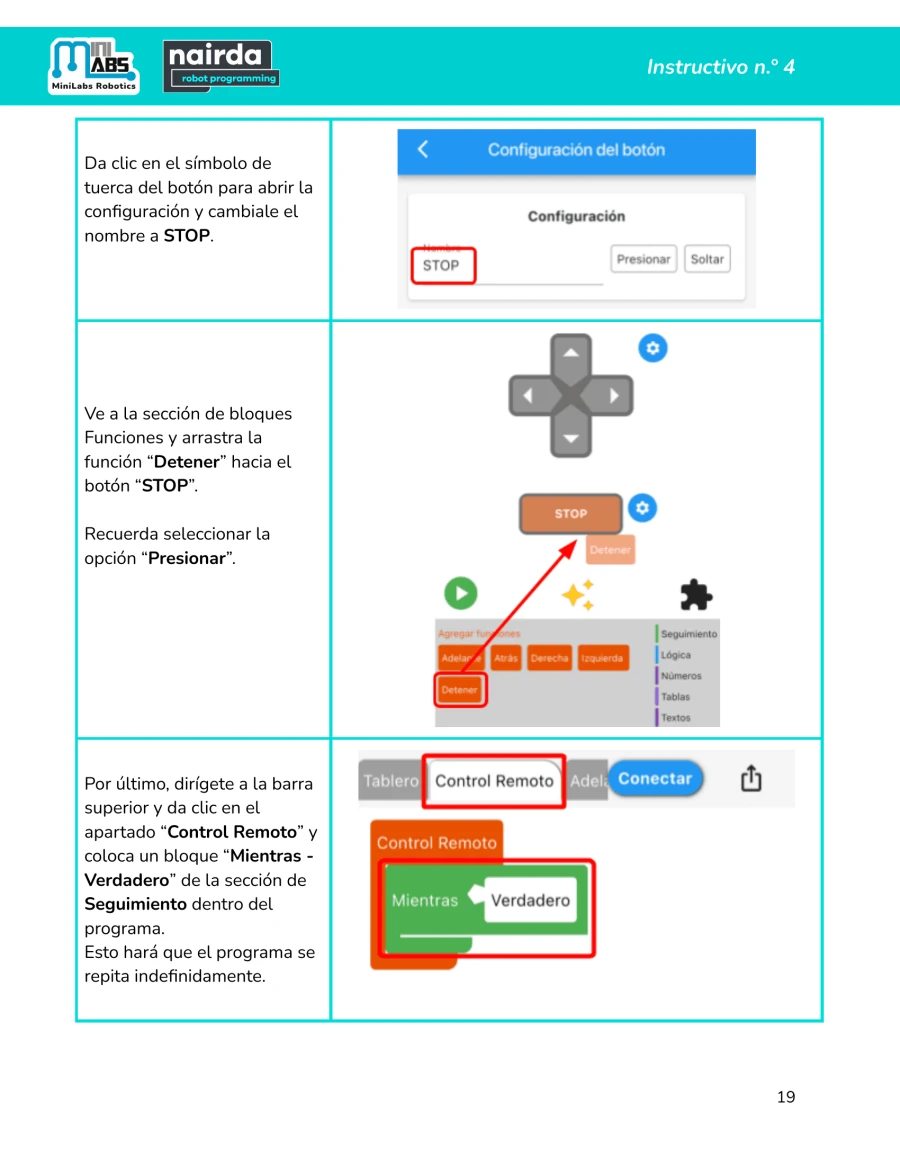
- Tablero de control con un control remoto (widget) y un botón STOP.
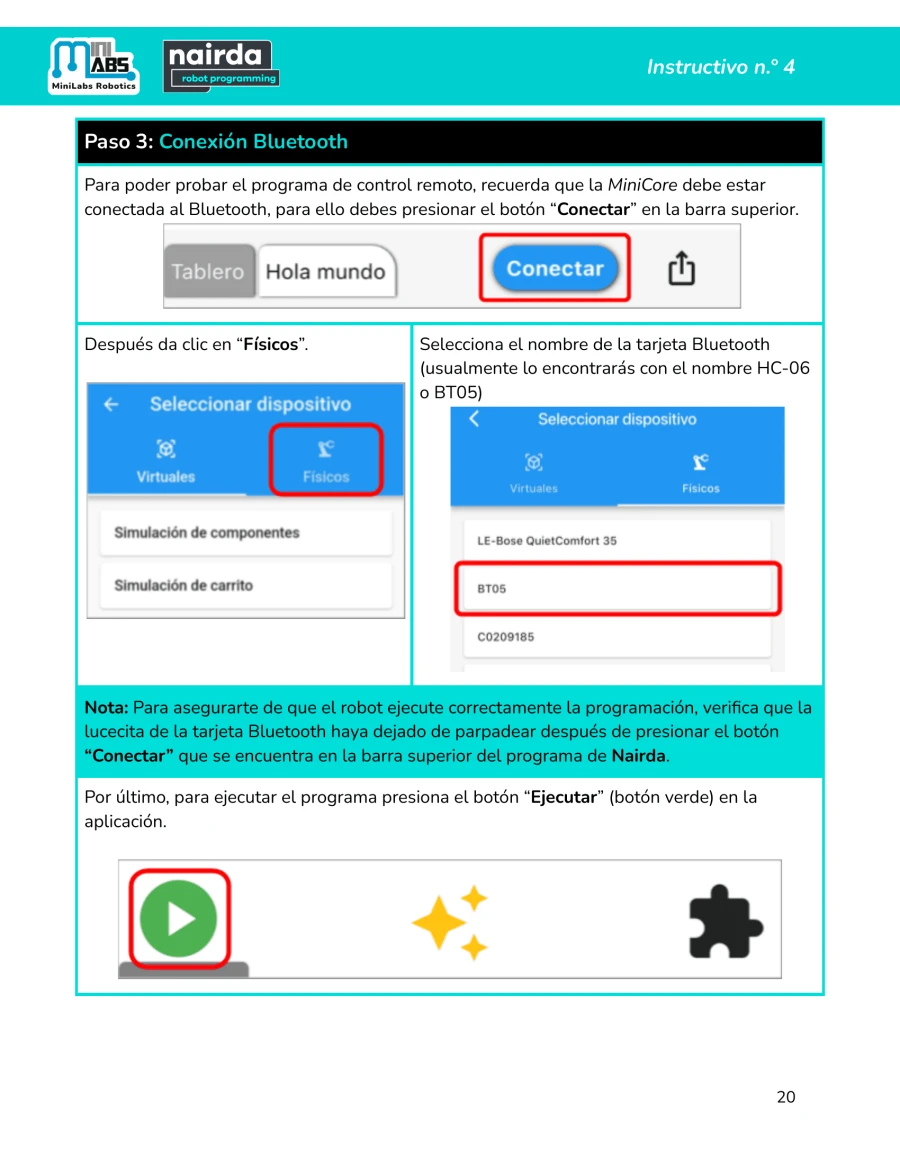
- Conexión Bluetooth con la tarjeta HC-06/BT05.
- Asignación de funciones a los botones del control mediante arrastrar y soltar.
Contenido completo del instructivo
ℹ️
Tip: Haz clic en cualquier imagen para verla en tamaño completo.