En este instructivo aprenderás a instalar el módulo siguelíneas sobre tu robot MiniCode y a programarlo para que siga una línea negra de forma autónoma.
⚠️
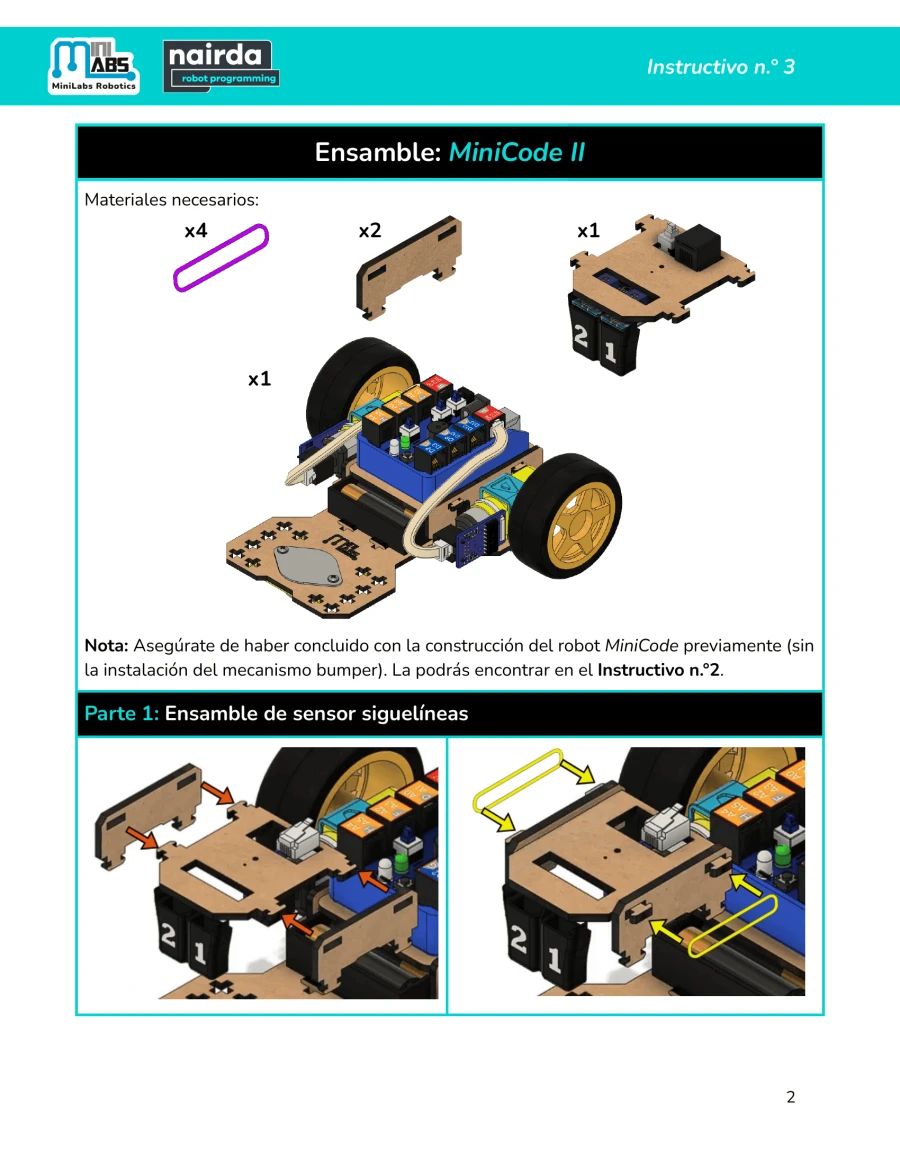
Requisito previo: Debes haber completado la construcción del robot MiniCode del Instructivo n.° 2 (sin el mecanismo bumper).
Ensamble MiniCode II
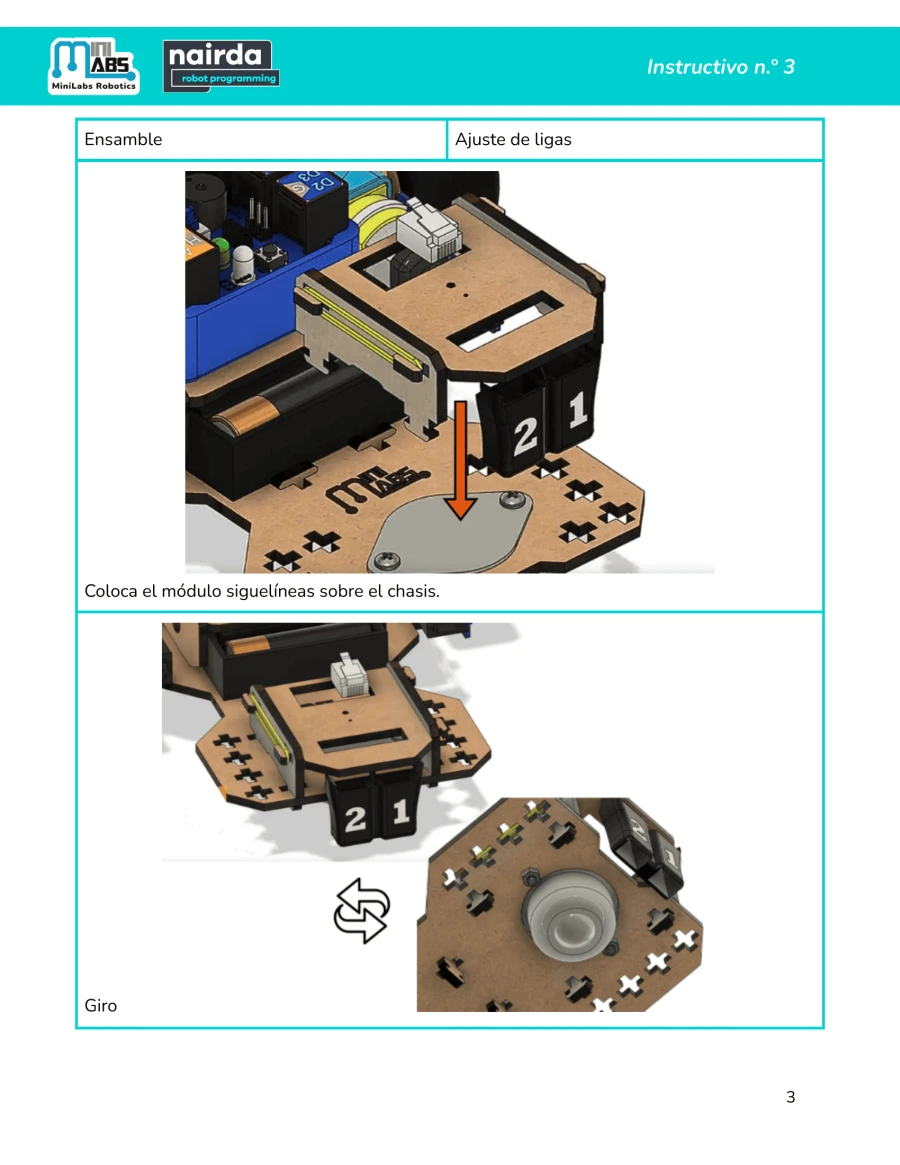
- Sensor siguelíneas — Montaje del módulo sobre el chasis con ajuste de ligas.
- Conexión a la MiniCore — Cable Web del sensor al puerto D (A0, A1).
Programación: Siguelíneas
La programación incluye:
- Creación de variables numéricas S1 y S2 para almacenar los valores de los sensores.
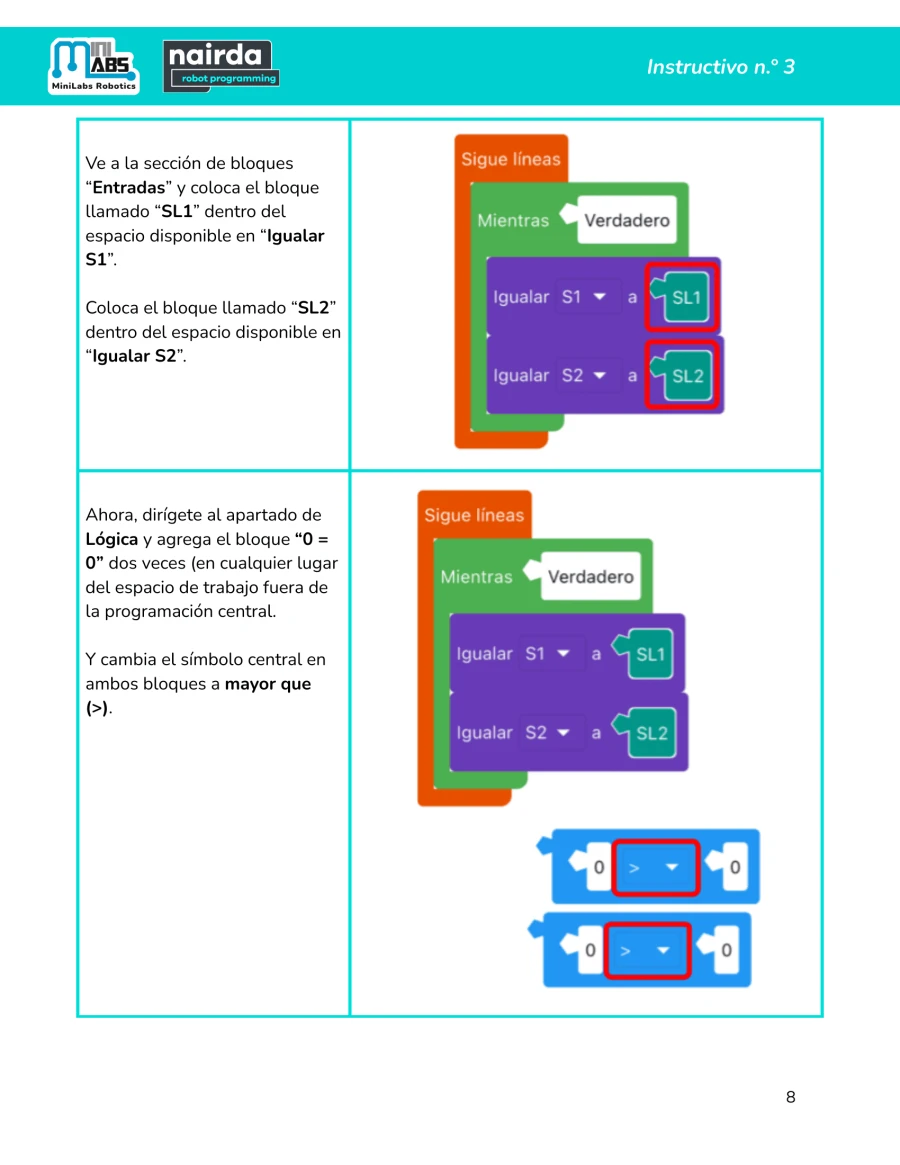
- Lectura de entradas analógicas SL1 (A0) y SL2 (A1).
- Configuración de motores A y B con sus respectivos pines.
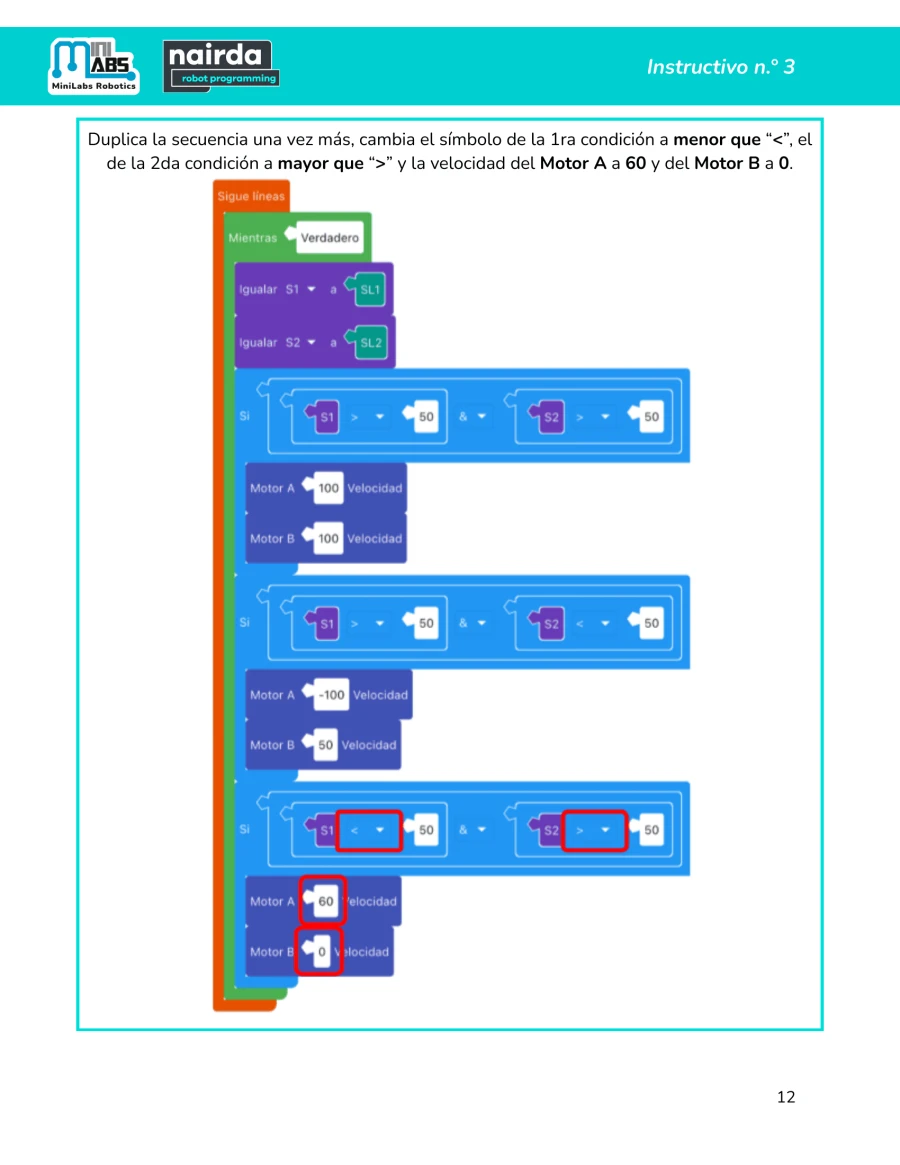
- Condiciones lógicas para:
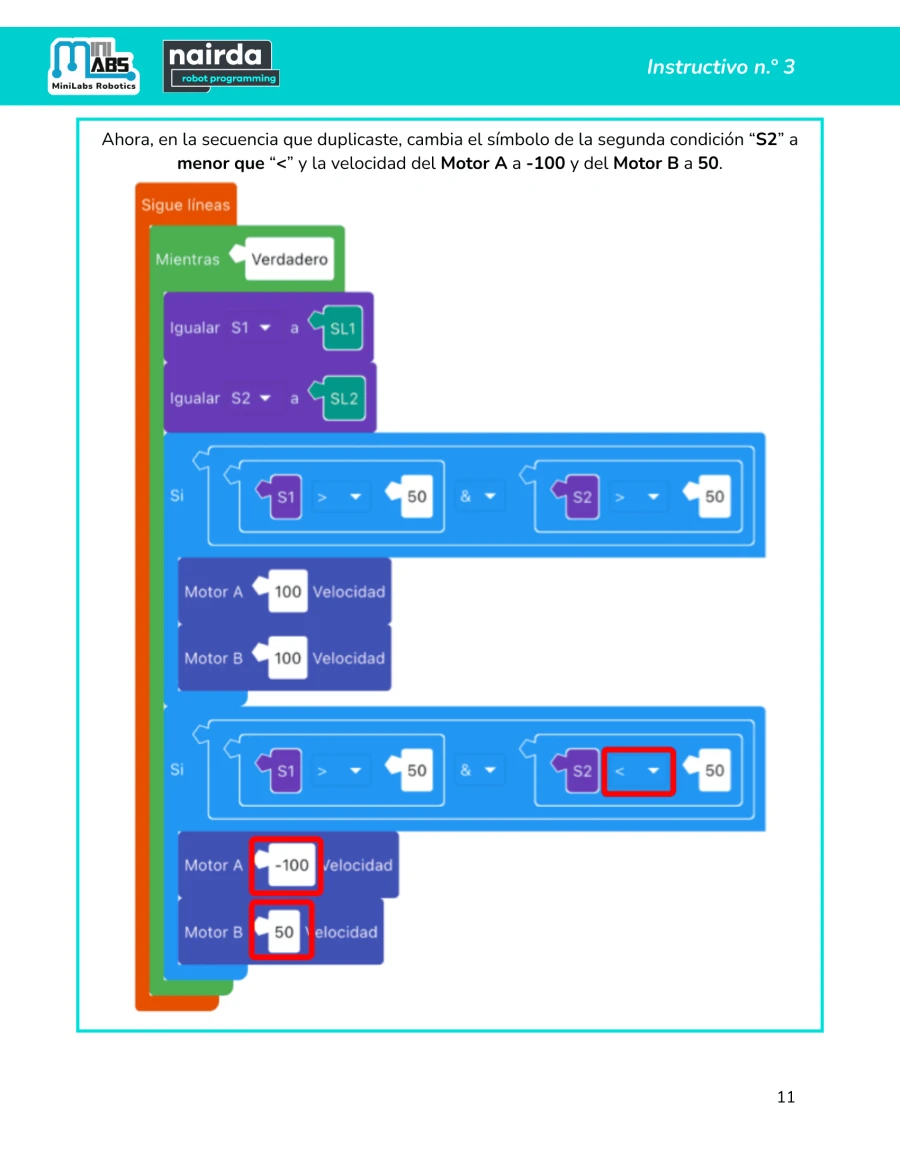
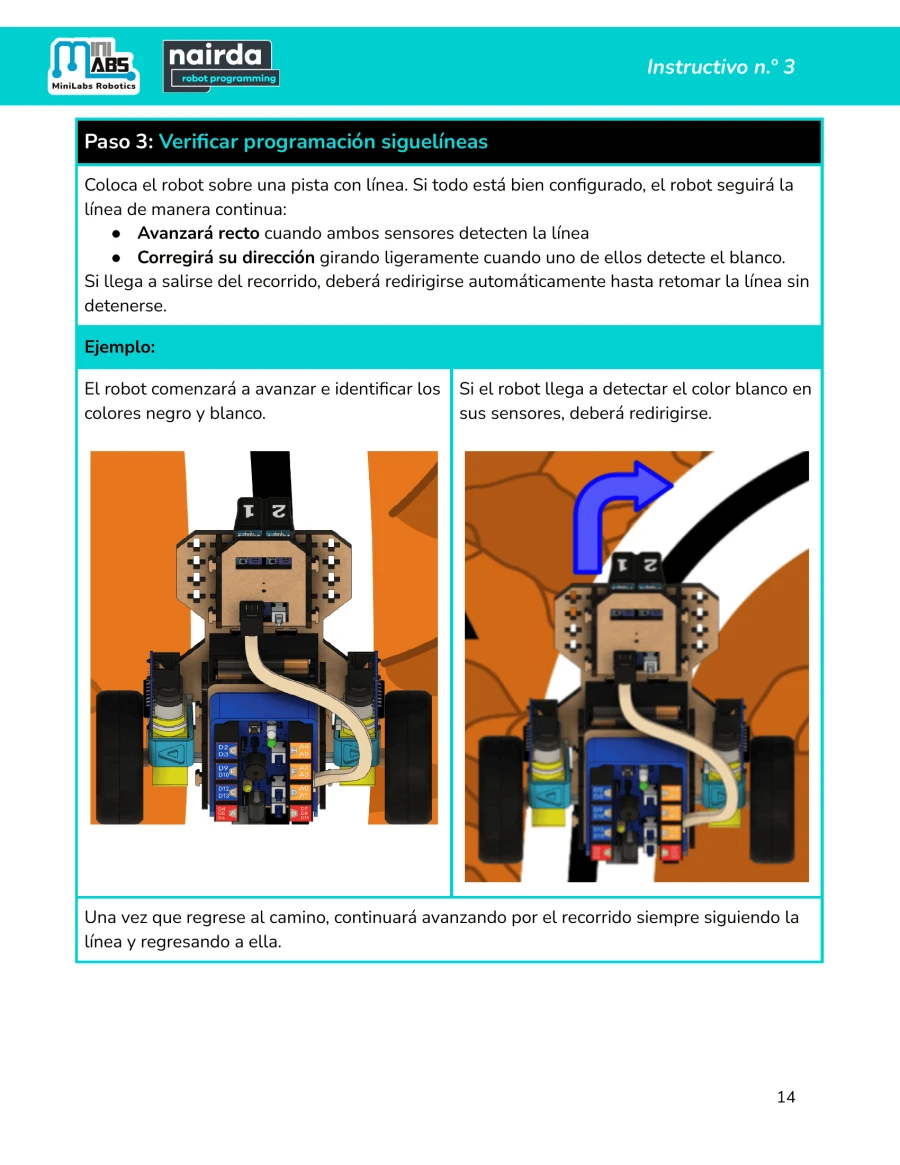
- Ambos sensores detectan línea (>50): avanzar recto a velocidad 100.
- S1 detecta, S2 no: corregir hacia un lado.
- S2 detecta, S1 no: corregir hacia el otro lado.
Contenido completo del instructivo
ℹ️
Tip: Haz clic en cualquier imagen para verla en tamaño completo.