En este instructivo aprenderás a construir el robot MiniCode I desde cero y a programar tu primer evasor de obstáculos usando los sensores de límite (bumper).
Ensamble MiniCode I
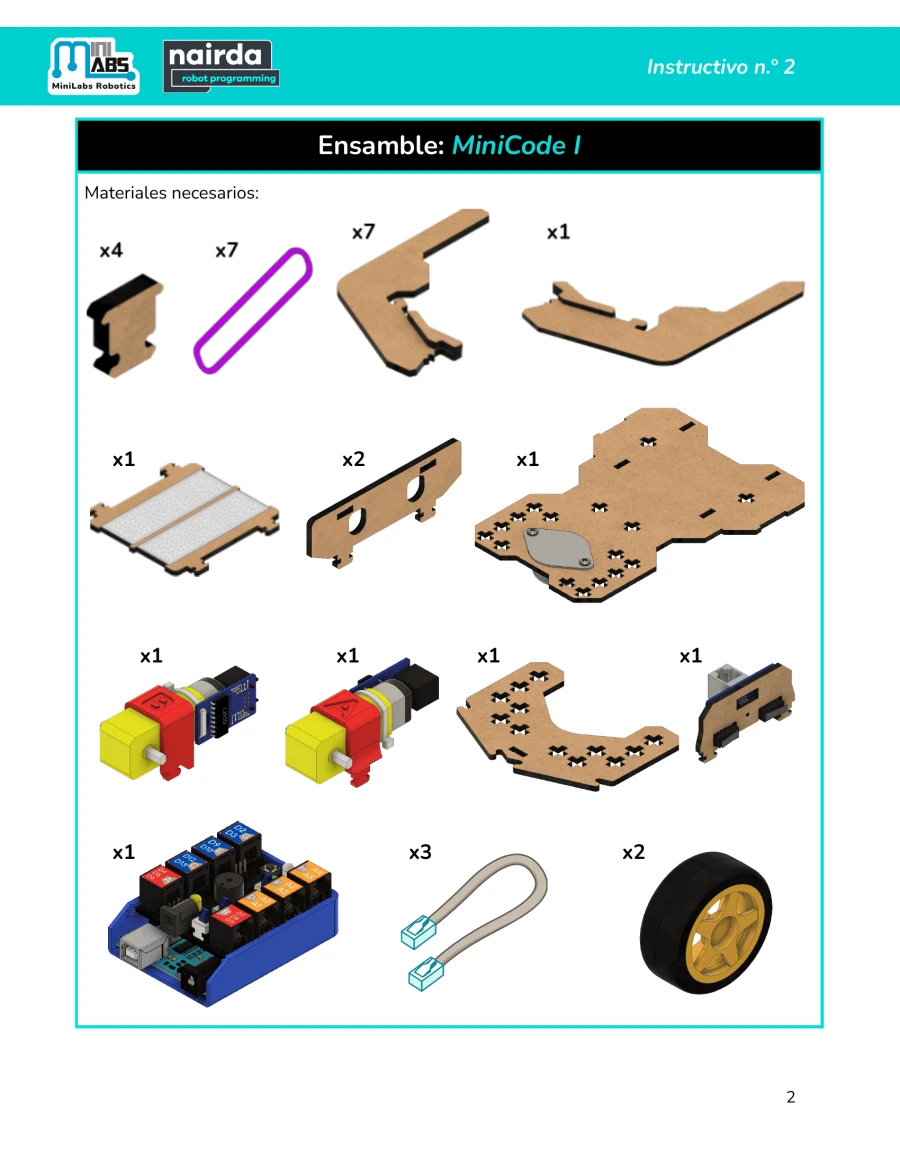
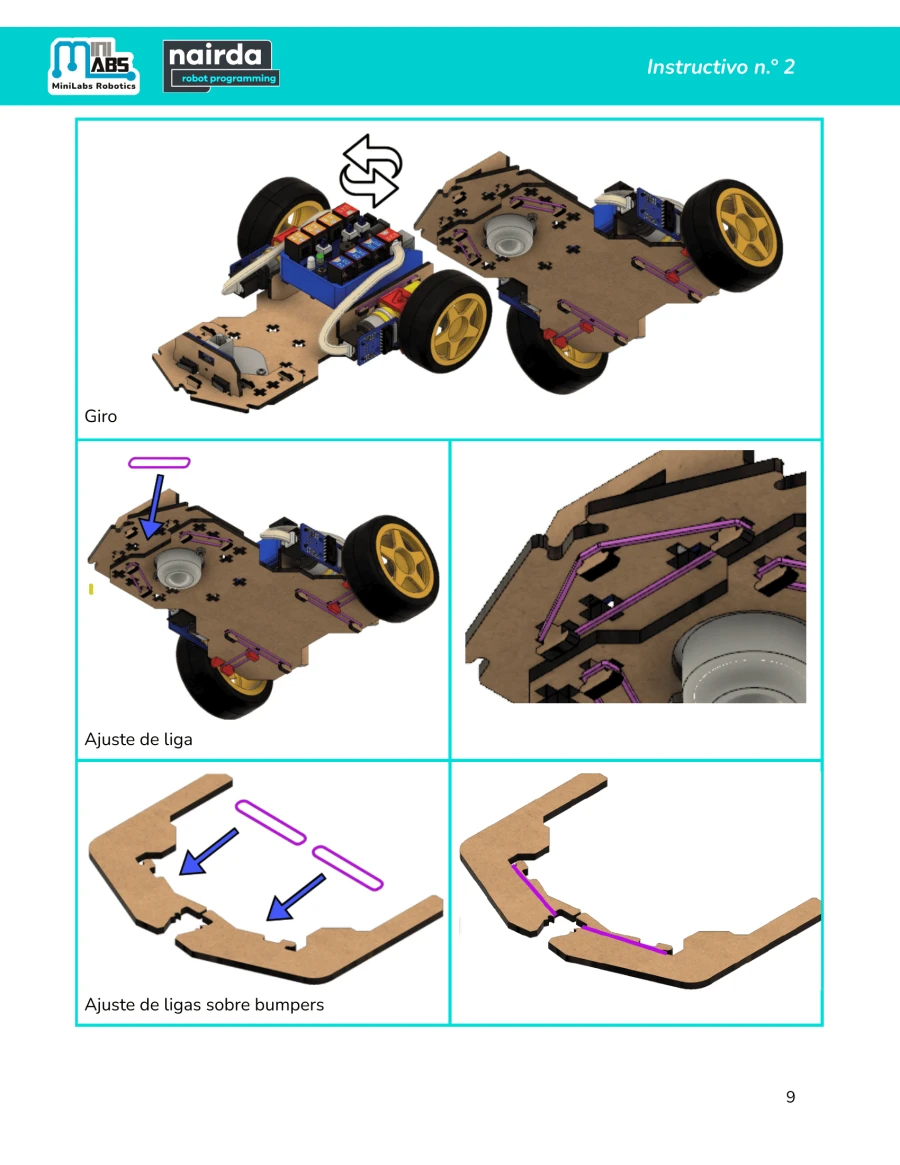
El ensamble se divide en 6 partes:
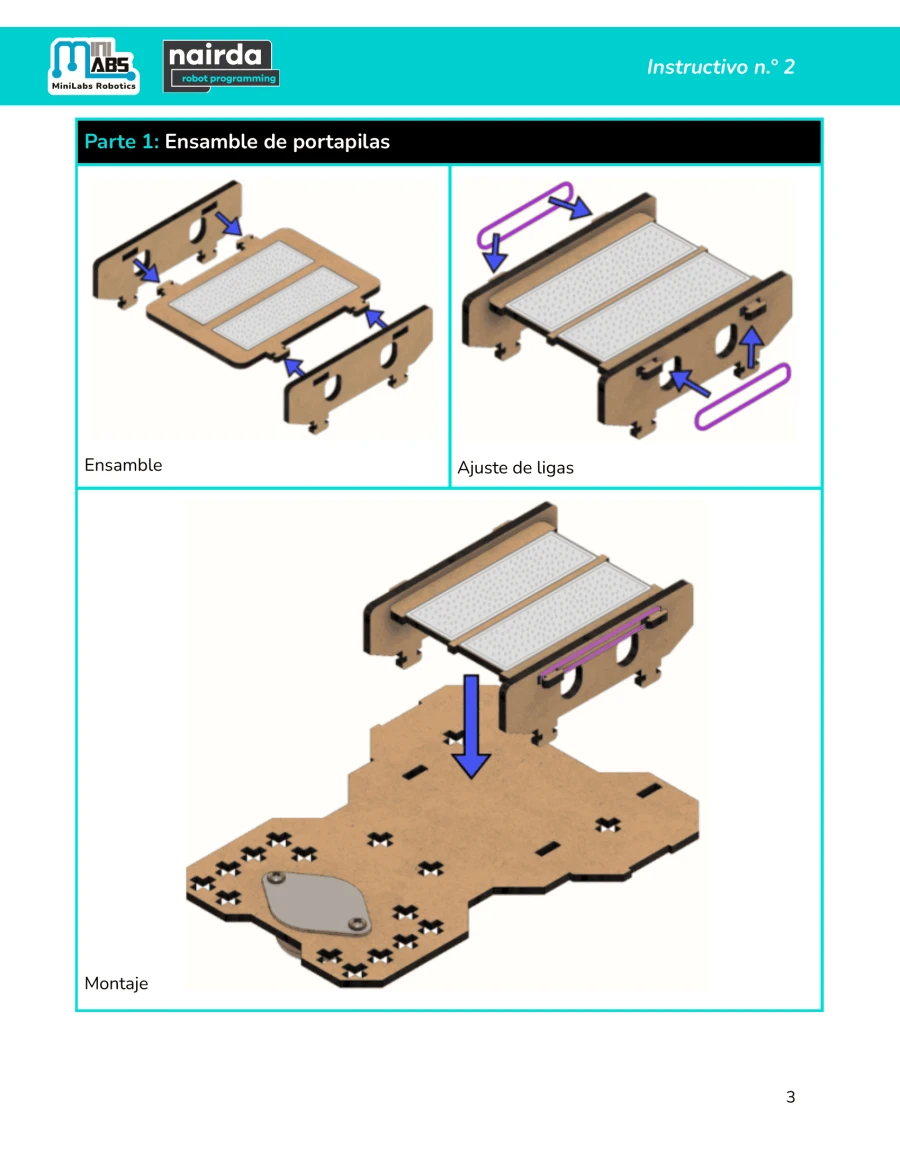
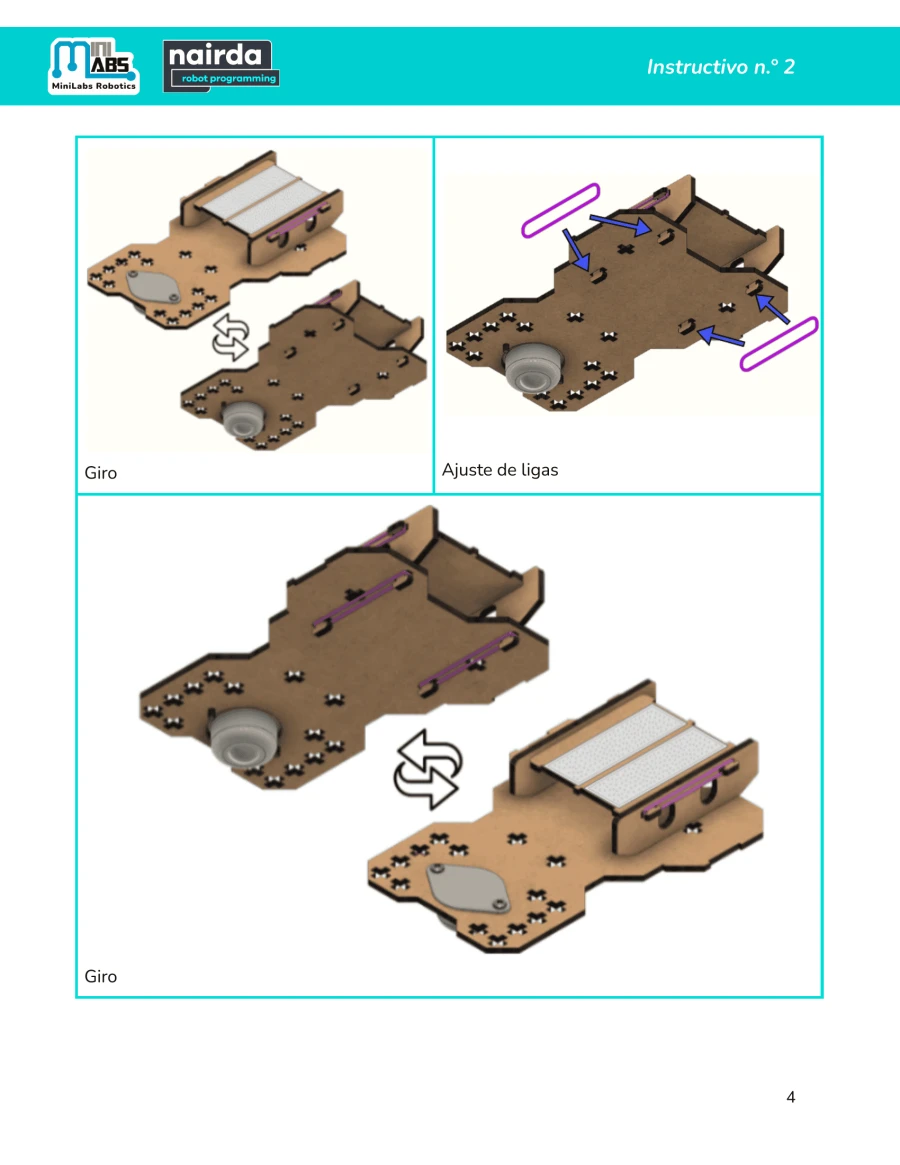
- Portapilas — Base de alimentación con ajuste de ligas.
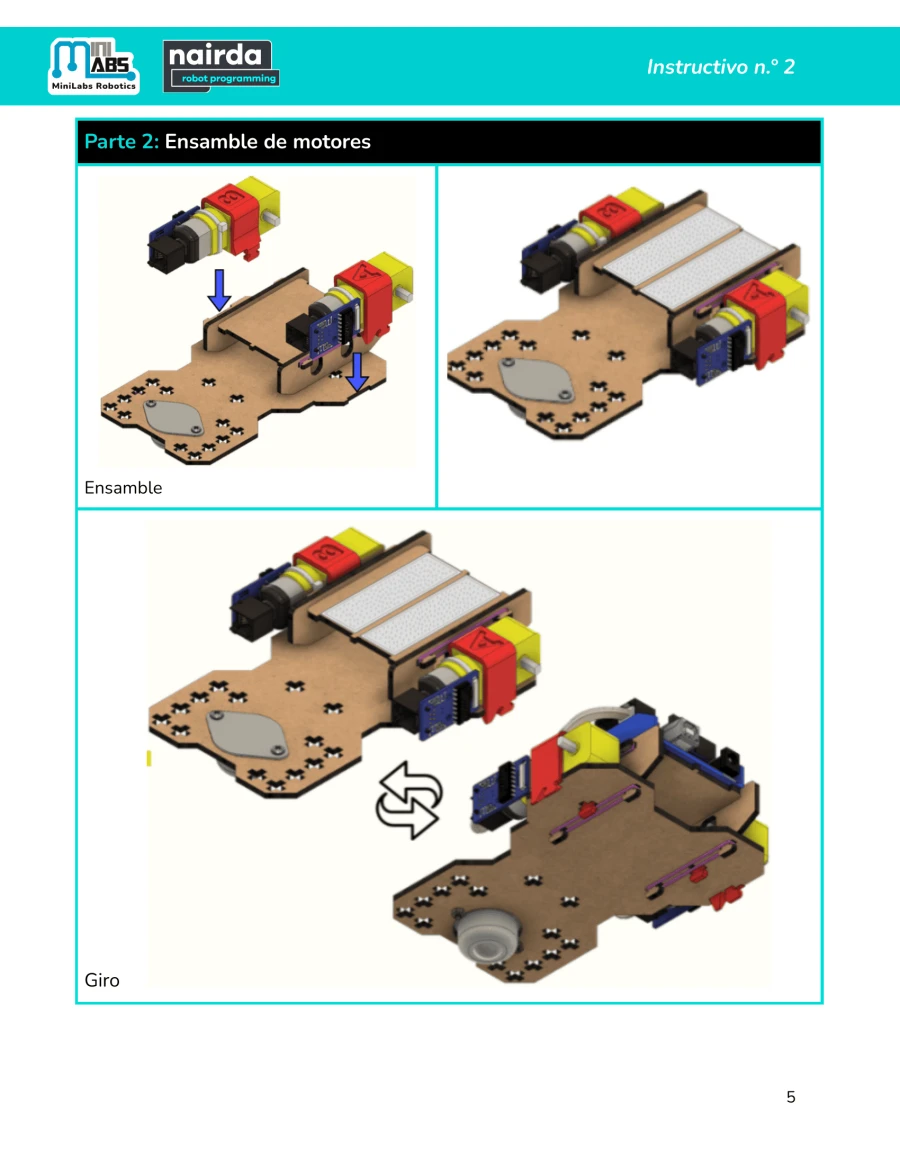
- Motores — Montaje y conexión de los dos motores DC.
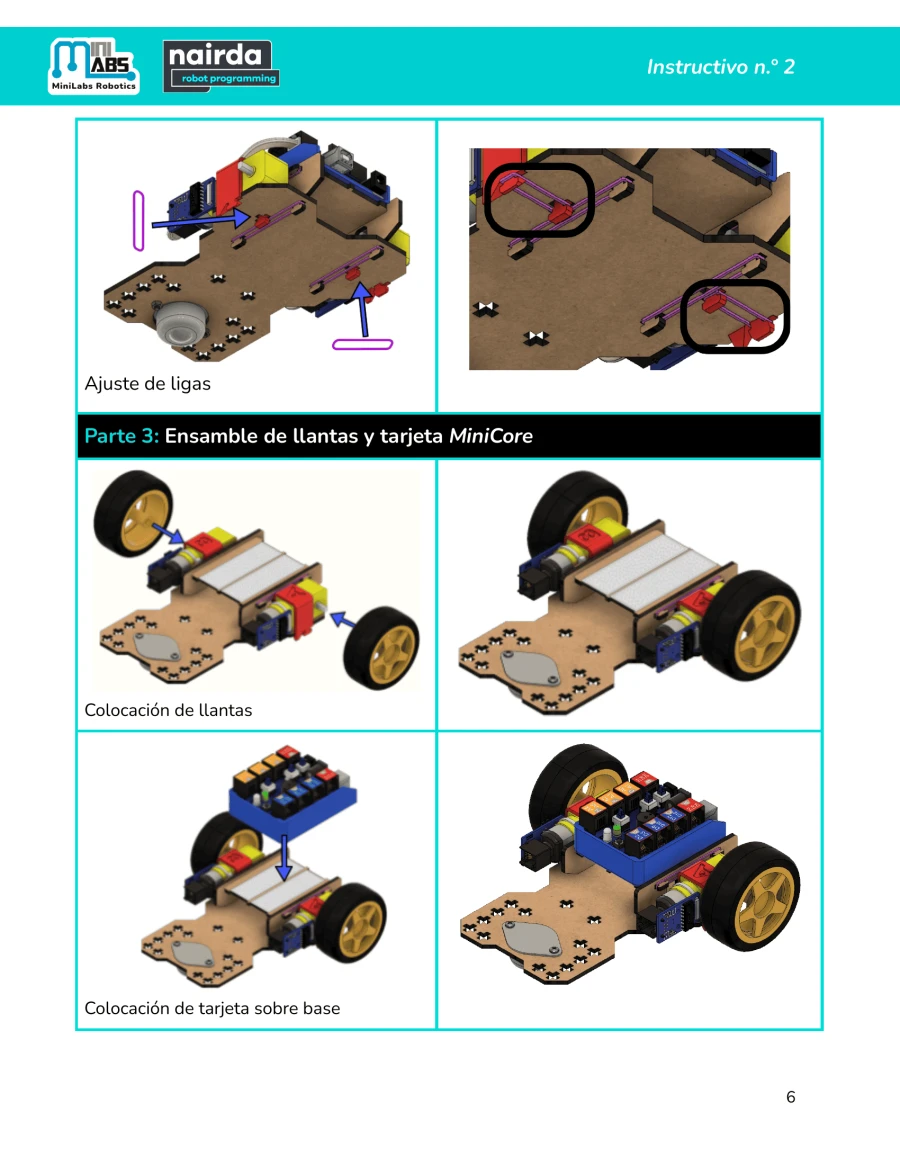
- Llantas y tarjeta MiniCore — Colocación de llantas y la tarjeta de control.
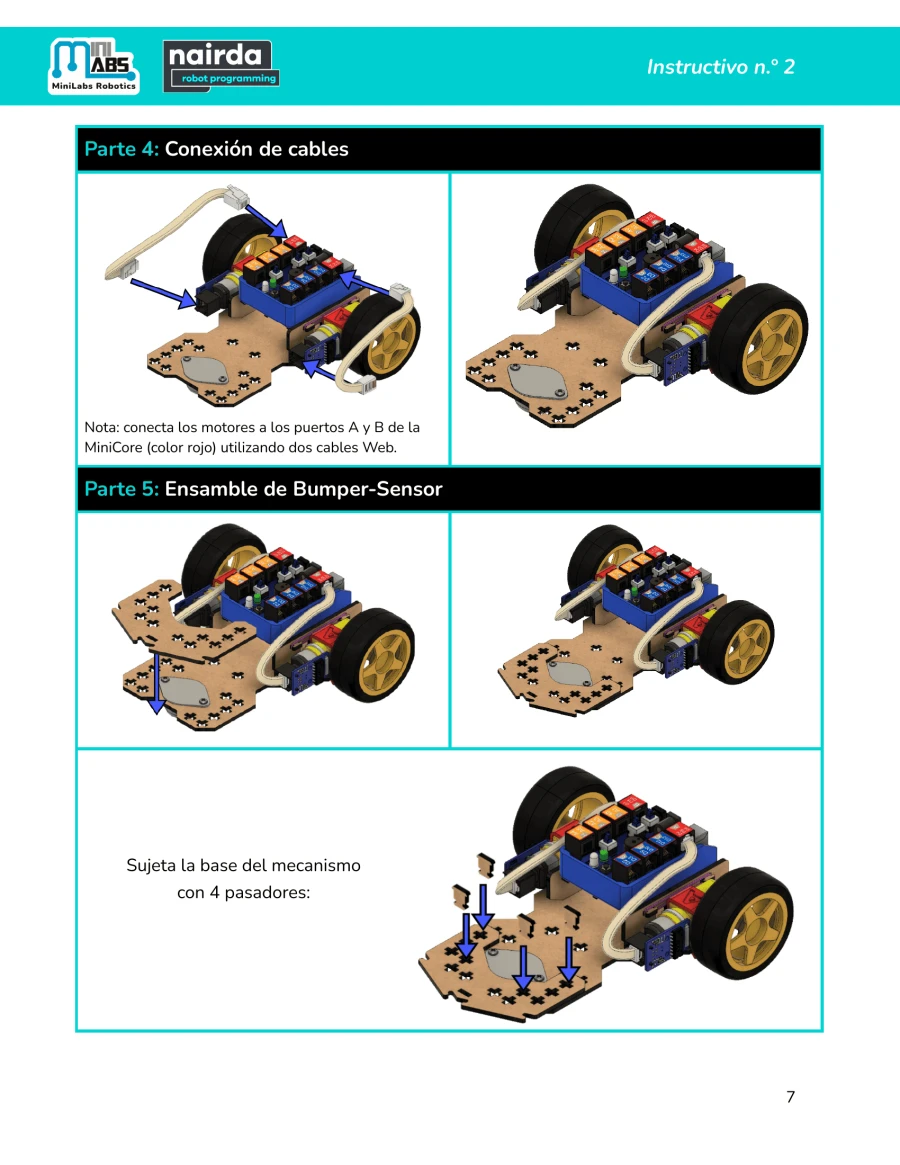
- Conexión de cables — Motores a puertos A y B de la MiniCore.
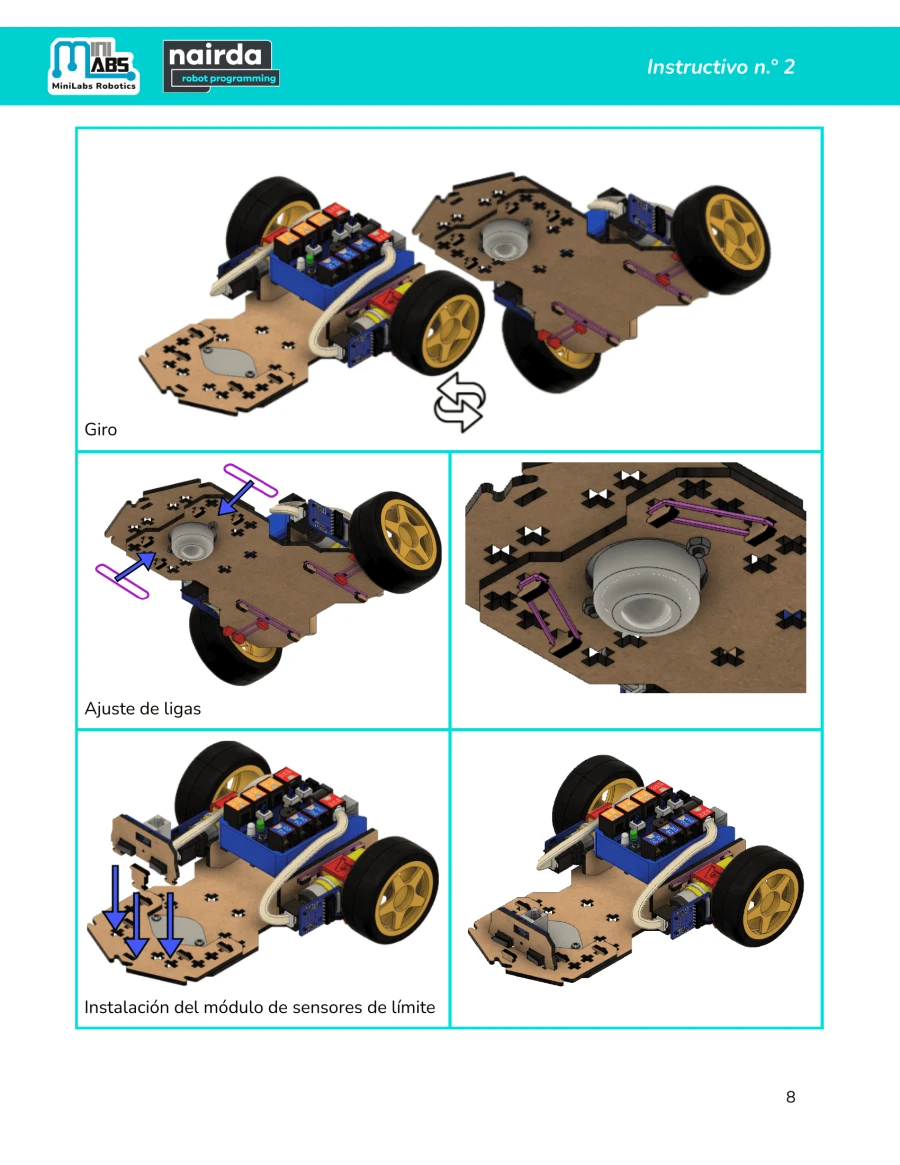
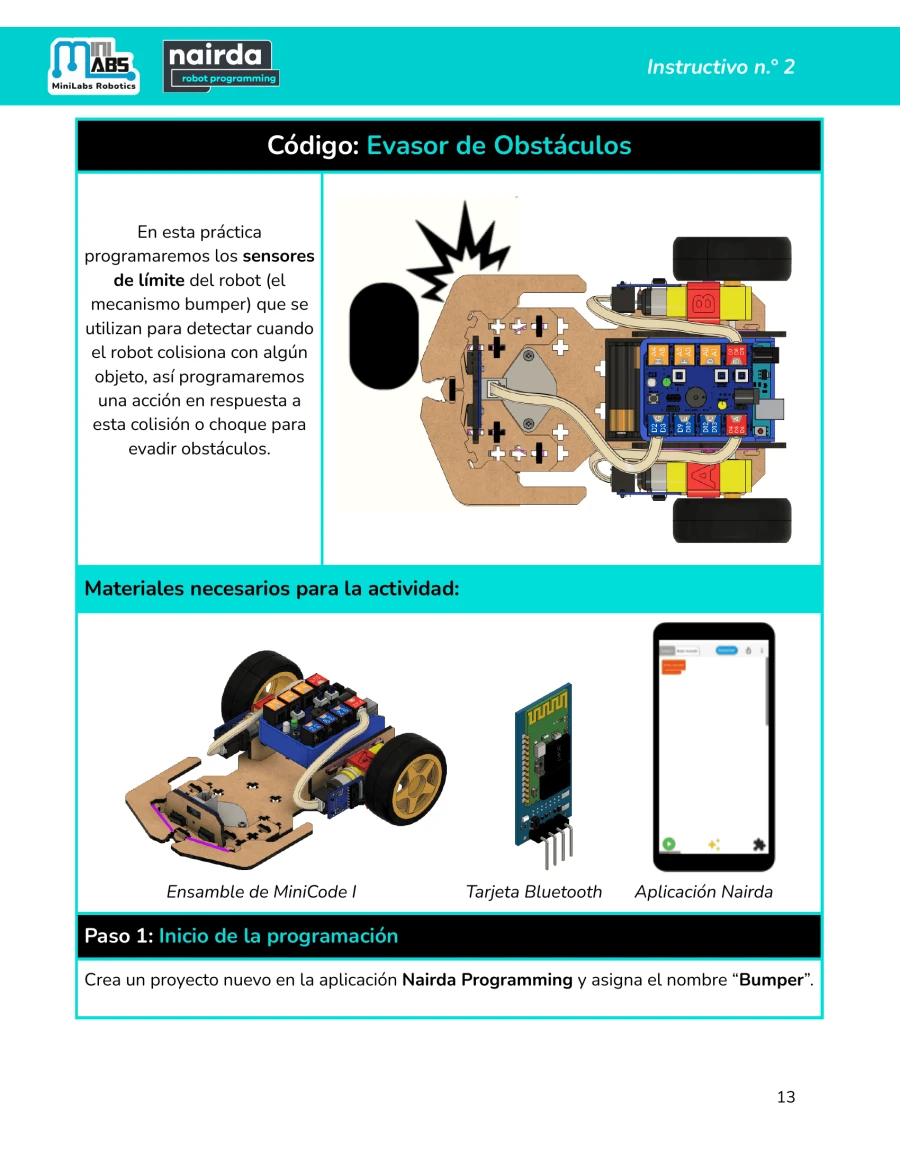
- Bumper-Sensor — Mecanismo de detección de obstáculos con sensores de límite.
- Conexión del sensor — Módulo de sensores al puerto G (D2, D3).
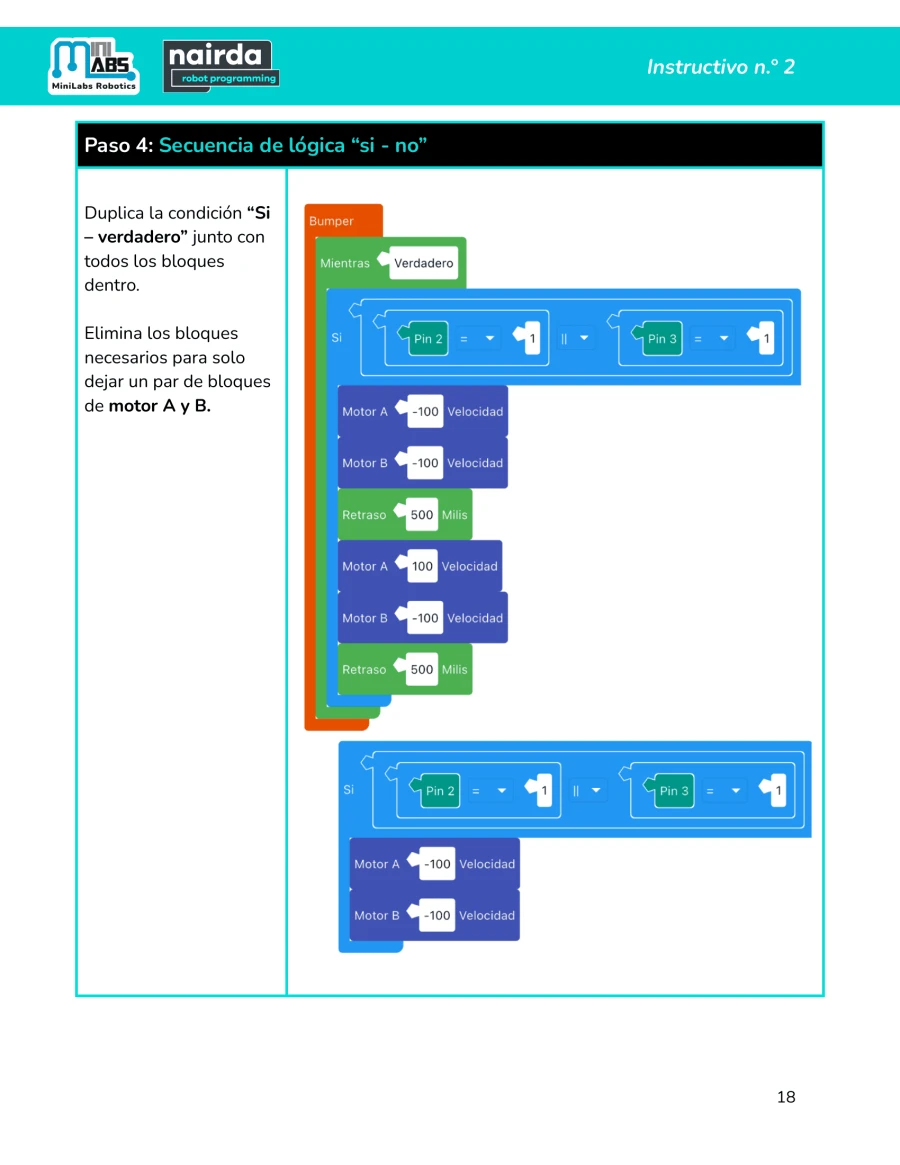
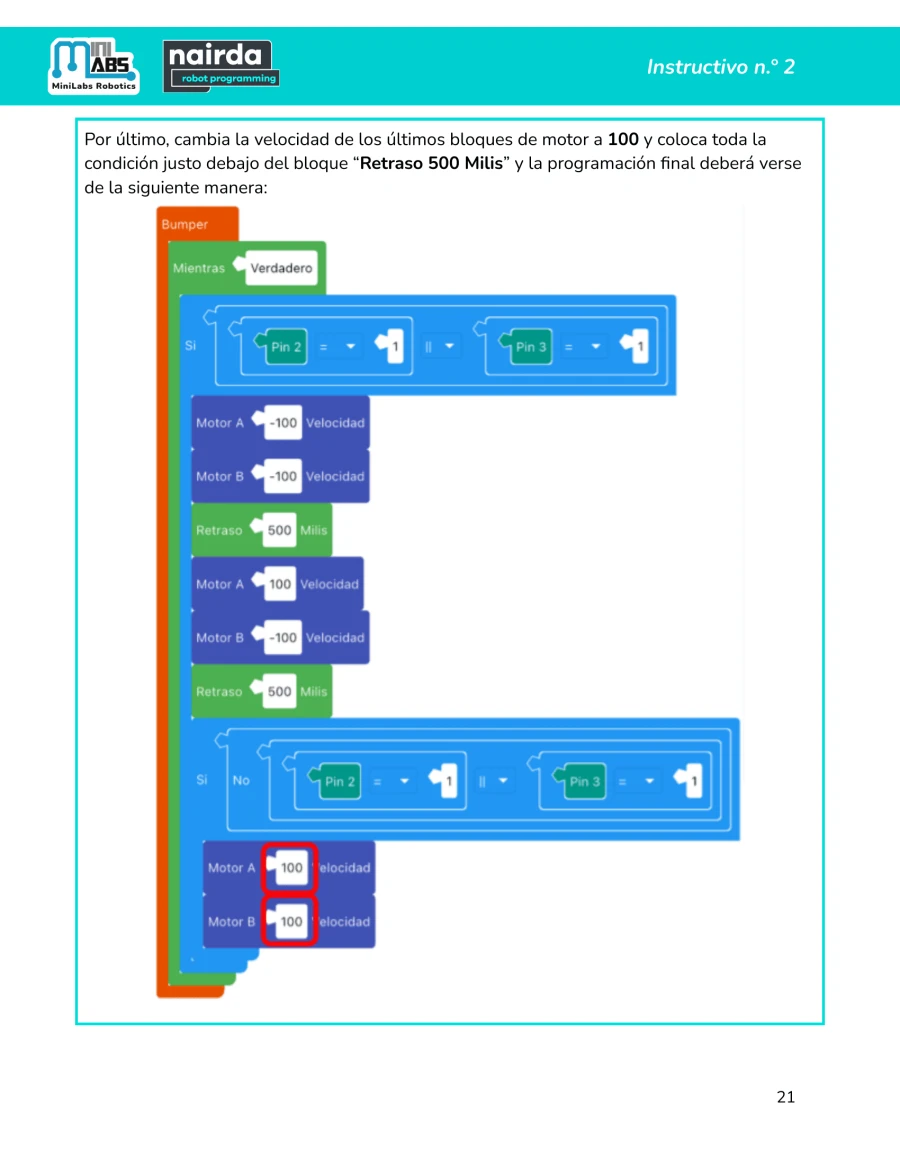
Programación: Evasor de obstáculos
Usando los bloques de Nairda, programarás:
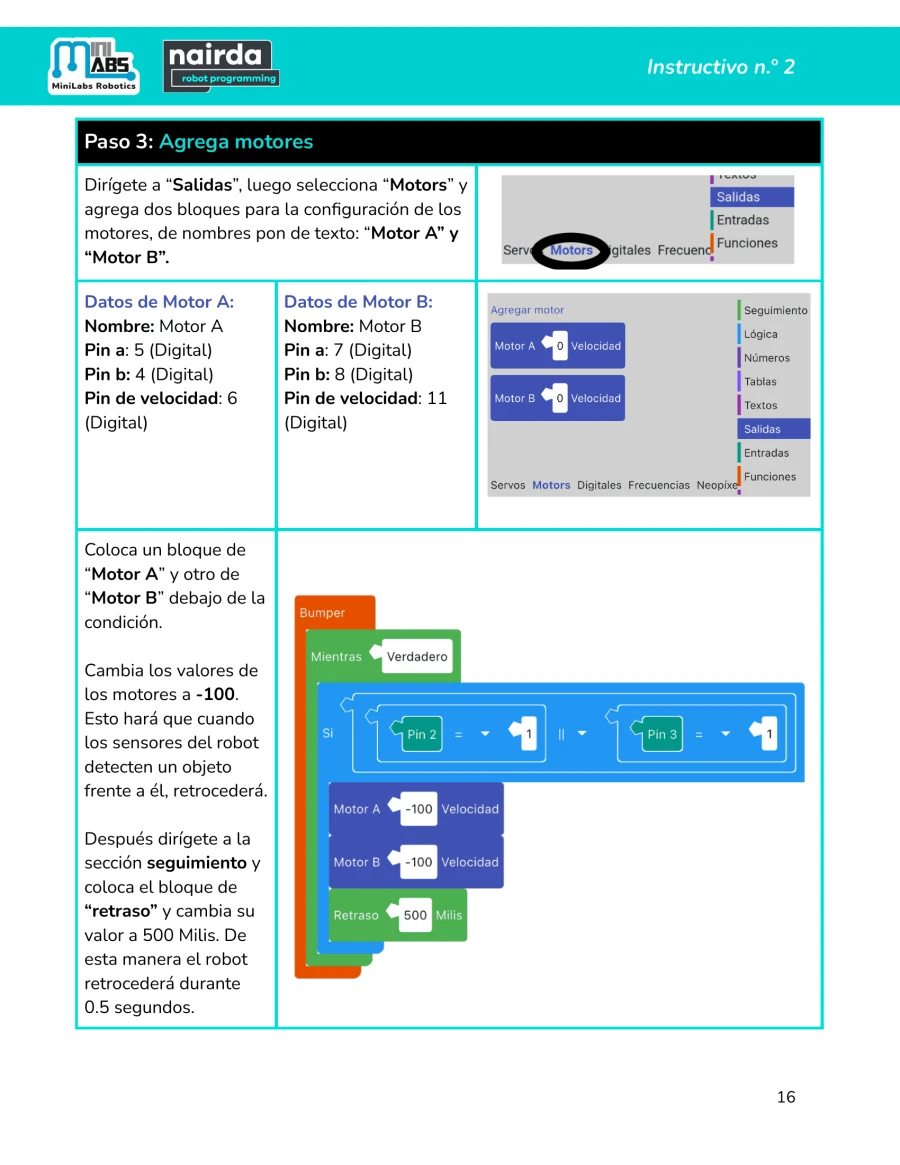
- Lectura de los pines digitales D2 y D3 (sensores de límite).
- Condiciones lógicas para detectar colisiones.
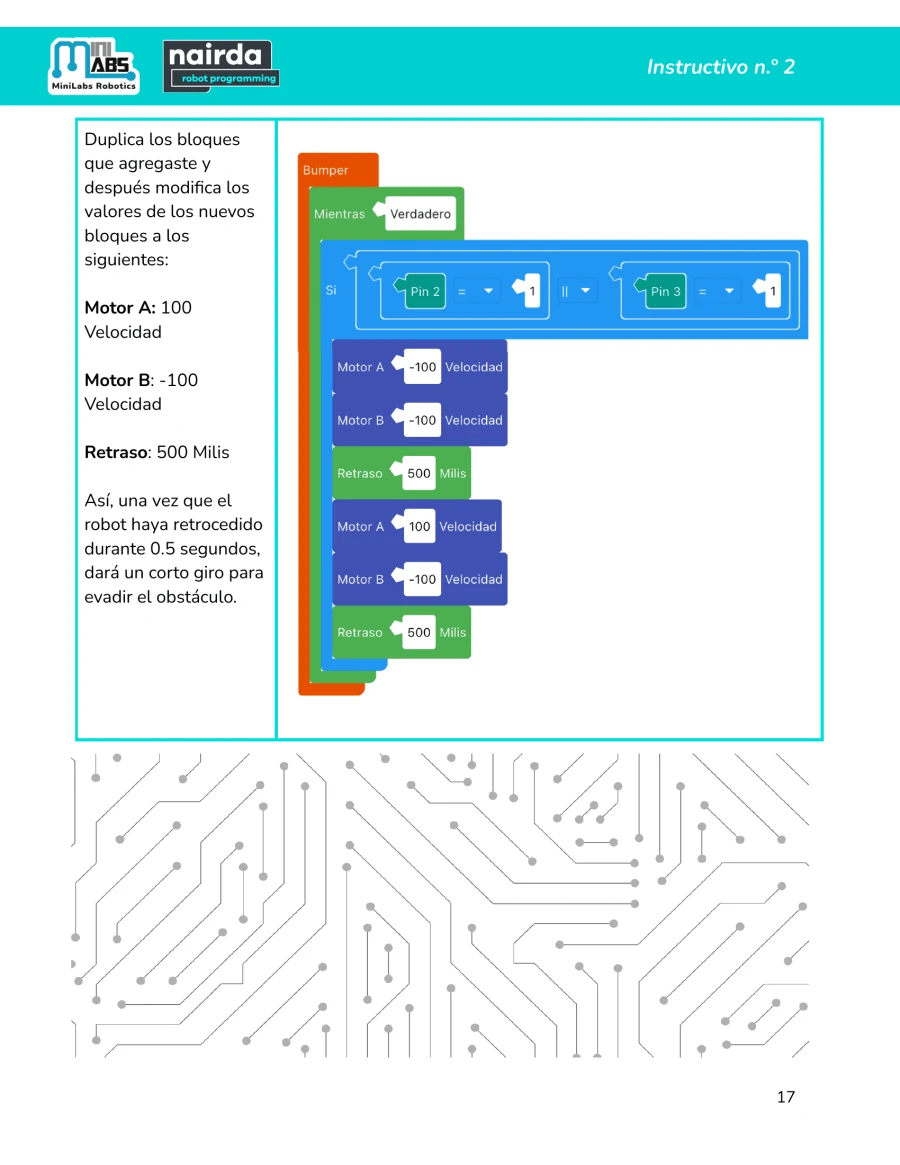
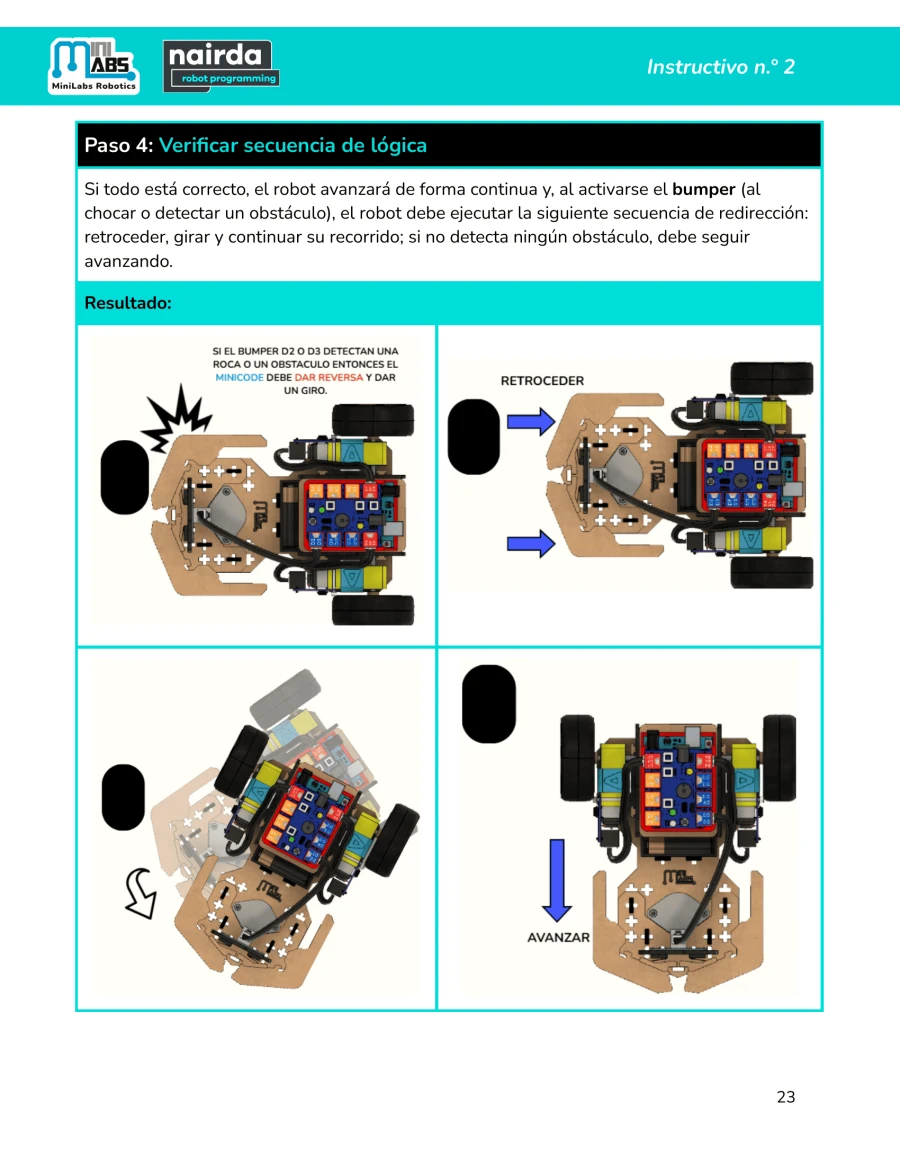
- Secuencia de evasión: retroceder, girar y continuar avanzando.
Contenido completo del instructivo
ℹ️
Tip: Haz clic en cualquier imagen para verla en tamaño completo.